J1939 Pressure Sensor-The Definitive Guide
What is a J1939 Pressure Sensor?
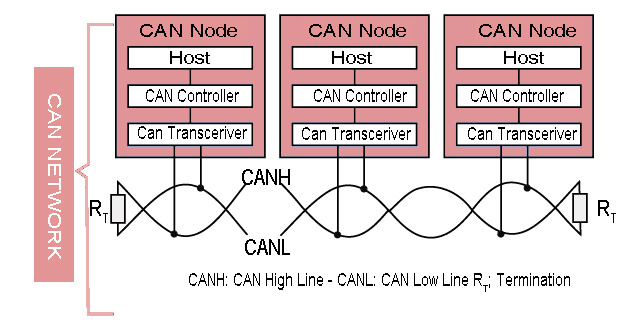
A J1939 pressure sensor is a transducer that converts physical pressure (hydraulic, pneumatic, or gaseous) into a digital packet that follows the SAE J1939 protocol and is broadcast on a Controller Area Network (CAN-Bus). In practice it combines three functional blocks
| Block | Purpose | Typical Components |
|---|---|---|
| Sensing element | Converts pressure → millivolt signal | Piezoresistive, thin-film, ceramic capacitive |
| Signal conditioning | Amplifies & linearises | Instrumentation amplifier, temperature-compensation network |
| J1939 node | Formats data into J1939 Parameter Group Number (PGN) frames and handles bus access | CAN controller + microcontroller + J1939 stack |
Key characteristics that separate a J1939 pressure sensor from “plain” CAN sensors:
- Hard-coded PGNs – most vendors map pressure to PGN 65266, SPN 108 (Hydraulic Pressure) or custom proprietary PGNs.
- 29-bit extended identifiers – required by J1939.
- Network management – supports address claiming, diagnostics (DM1/DM2), and transport protocol for >8-byte data.
- Vehicle/industrial vocabulary – interpretable by ECUs made by John Deere, Caterpillar, Volvo, etc.
In short, whenever you need a plug-and-play pressure reading that any J1939-aware ECU or data logger can “understand” without custom parsing, you need a J1939 pressure sensor.
CAN-Bus vs CANopen vs J1939 – How Do They Relate?
All three acronyms sit on different layers of the same communication cake. The table below highlights where each belongs:
| ISO/OSI Layer | CAN-Bus (ISO 11898) | CANopen (CiA 301) | J1939 (SAE J1939-21/71/73 etc.) |
|---|---|---|---|
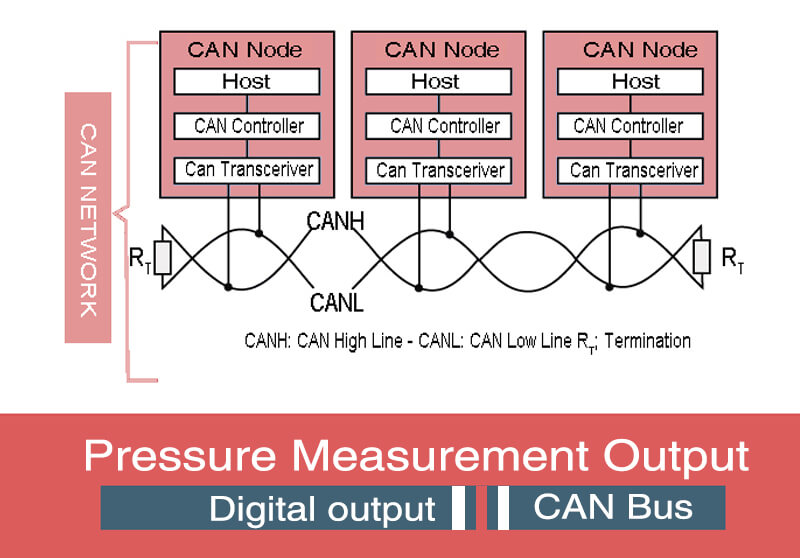
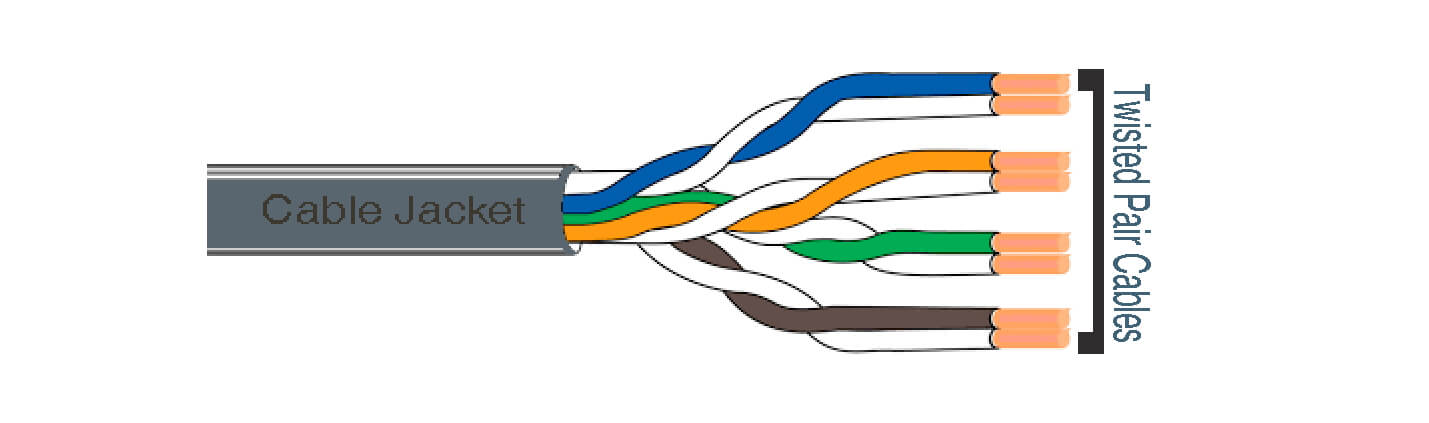
| Physical | Twisted pair, 1 Mbit/s max, dominant/recessive bits | inherits CAN | inherits CAN |
| Data-Link | Arbitration, 11/29-bit IDs, CRC, ACK | inherits CAN | inherits CAN |
| Network | — (none) | NMT (Node-State) | Address Claiming (BAM/RTR) |
| Transport | — (none) | SDO, PDO | TP.BAM, TP.CM |
| Application | — (none) | Device Profiles (CiA 406 Pressure/Force) | Vehicle/Pgn-SPN dictionary (pressure = SPN 108 etc.) |
Let’s make a comparison:
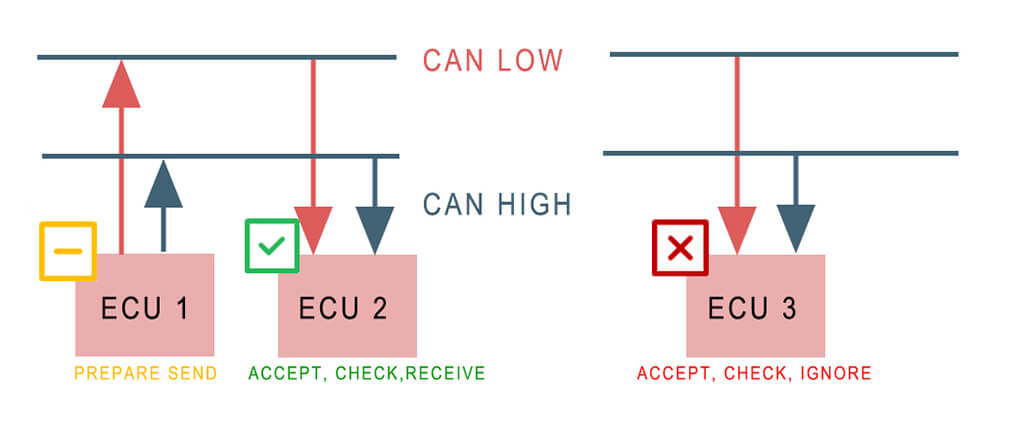
- CAN-Bus is only Layer 1/2: bit timing, arbitration, and error handling. Frames are meaningless unless an upper-layer protocol defines what each identifier means.
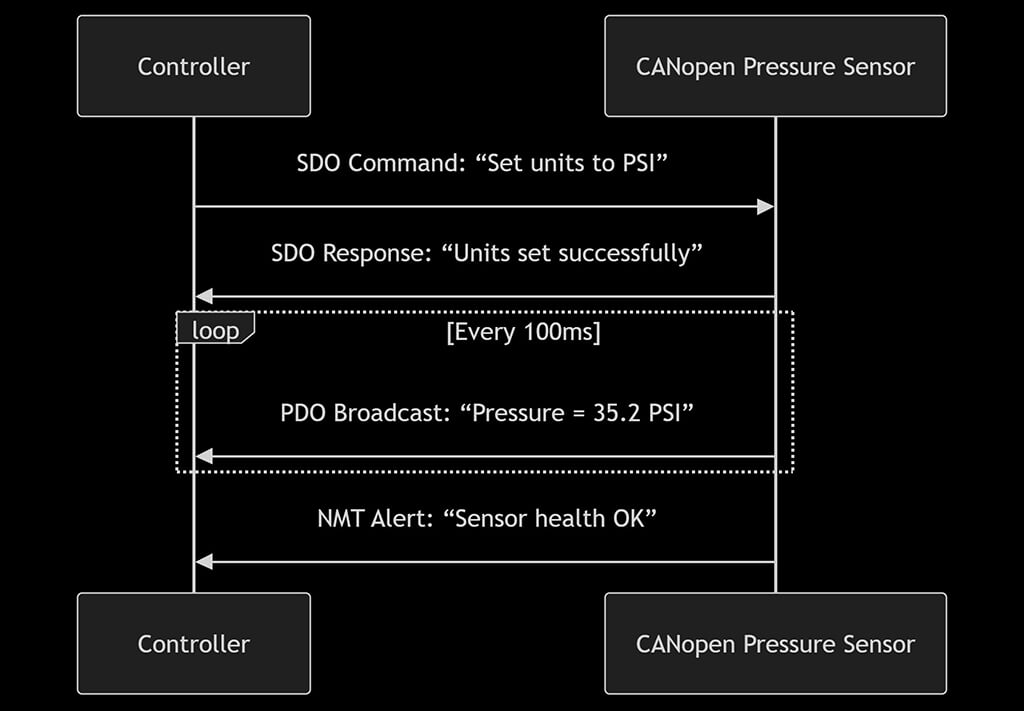
- CANopen adds a standardised object dictionary, heartbeat, and emergency messages. IDs are primarily 11-bit; node ID is encoded inside the base identifier. It is popular in factory automation, medical devices, and renewable energy.
- J1939 targets diesel powertrains, off-highway machinery, and heavy EVs. It mandates 29-bit identifiers and reserves specific PGNs for pressure, temperature, RPM, etc. J1939 also defines diagnostic messages (DM1-DM14) and transport protocol for multi-packet data.
Why this matters when you select a pressure sensor
| Scenario | Best Choice | Reason |
|---|---|---|
| You have mixed ECUs from Caterpillar, Cummins, or Deutz | J1939 sensor | Every ECU already listens for pressure PGNs |
| You integrate into a factory robot with CiA 406 master | CANopen sensor | Master polls/receives via PDO 0x180+NodeID |
| You build your own microcontroller board, no upper-layer stack | Raw CAN sensor | Gives you full freedom, cheapest silicon |
Remember: all J1939 and CANopen devices are CAN devices, but not all CAN devices speak CANopen or J1939. Selecting wrongly forces you to write glue code or gateway firmware.
How Does the J1939 Protocol Work?
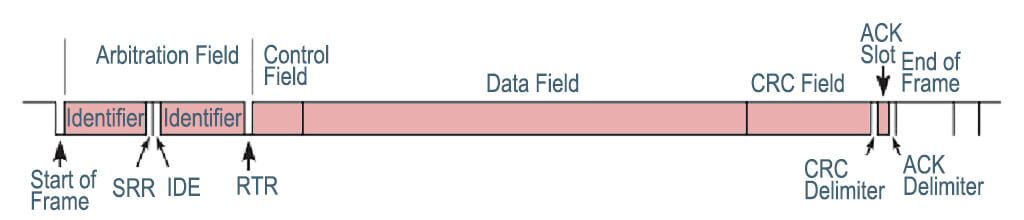
- Identifier Structure (29 bit)
Priority (3) | Reserved (1) | Data Page (1) | PDU Format (8) | PDU Specific (8) | Source Address (8)
• PGN = DP + PF + PS (or DP + PF when PF < 240). - Pressure Example
• PGN 65266 (0xFEEE) “Analog Pressure #1” contains SPNs: 108 (Hydraulic Pressure), 109 (Air Pressure), etc.
• A sensor microcontroller fills the 8-byte data field with scaled values (e.g., 1 bit = 0.5 kPa, offset = 0 kPa). - Address Claiming
On power-up each node sends CLAIM (PGN 60928). If an address conflict occurs, the node with lower NAME priority keeps the address; the loser must pick another or go silent. High-end sensors allow changing the preferred address via over-the-bus commands. - Transport Protocol
For payloads >8 bytes (e.g., calibration curves) the sensor uses TP.BAM (broadcast) or TP.CM/TP.DT (peer-to-peer) splitting data into up to 255 packets. - Diagnostics
• DM1: Active DTCs → flashing MIL on dashboards.
• DM2: Previously active DTCs.
A quality pressure sensor sets DM1 bits for over-range, internal fault, EEPROM error, etc., enabling predictive maintenance. - Update Rate and Bus Loading
Standard broadcast rate for pressure PGNs is 100 ms (10 Hz). At 250 kbit/s this uses <1 % of bus bandwidth, leaving headroom for dozens of sensors plus chatter from the engine ECU.
Understanding the above lets you estimate bus utilisation, address planning, and diagnostics strategy before you purchase hardware.
Why / When Do You Need a J1939 Pressure Sensor?
Use J1939 when your project ticks at least two of the boxes below
| Requirement | J1939 Fit | How the Sensor Helps |
|---|---|---|
| Existing J1939 backbone (trucks, harvesters, large AGVs) | Excellent | Sensor drops in with one Deutsch DT04-4P connector—zero code |
| Distance >5 m between sensor & ECU | Good | Digital data immune to voltage drop & EMI; no 4-20 mA errors |
| Multi-vendor ecosystem | Excellent | Common PGN definitions avoid proprietary decoding |
| Strict uptime & diagnostics | Excellent | DM1/DM2 messages flag out-of-tolerance before breakdown |
| Need to log data to telematics gateway | Good | Gateways (Raven, Trimble, Mobileye) already parse pressure PGNs |
| Cost-sensitive, single-vendor | Fair | J1939 stack adds ~5 USD BoM vs. analog; CANopen might be cheaper |
| Update speed >100 Hz | Poor | J1939 typical 10–20 Hz; choose analog or raw CAN |
Typical applications:
- Hydraulic brake and suspension control on heavy trucks.
- Boom pressure monitoring on concrete pumps or aerial platforms.
- Hydrogen storage pressure in fuel-cell buses (with 500 bar range).
- Transmission oil pressure diagnostics to schedule predictive maintenance.
Business benefits:
- Wiring savings – a single 4-wire trunk replaces multiple shielded analog lines.
- Simpler safety certification – error flags are digital (no ambiguous 3.5 mA fault).
- Fleet-wide compatibility – one SKU covers John Deere, Case-IH, Komatsu.
Summary
A J1939 pressure sensor is the fastest route to obtain reliable, diagnostics-rich pressure data on any heavy-duty CAN network. Understanding how CAN-Bus, CANopen, and J1939 stack together lets you choose the right sensor before design freeze. Evaluate your bus architecture, diagnostics needs, and vendor mix; if they align with J1939, the small price premium buys plug-and-play integration, less wiring, and fleet-wide interoperability. For additional questions, revisit the FAQ or contact a sensor vendor that offers configurable PGNs and robust self-diagnostics.
FAQ
Can I change the PGN or source address myself?
Most quality sensors support proprietary PGN 0xEF00 “Configure”. Using a CAN tool send a “Set SA” command, cycle power, and the new address is stored in EEPROM.
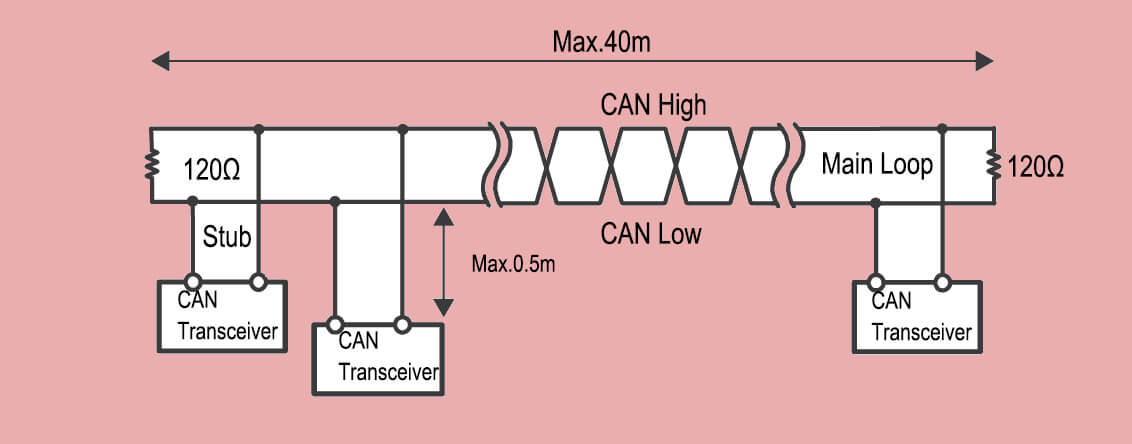
What cable length is safe at 250 kbit/s?
Up to 40 m with 24 AWG twisted pair and ≤120 Ω termination. If you need 500 kbit/s keep it under 30 m or use repeaters.
How is the pressure value scaled?
The J1939 standard for SPN 108 uses: Resolution = 0.5 kPa/bit, Offset = 0 kPa, Data Type = uint16. So 0x07D0 = 2000 kPa.
Can one ECU handle both CANopen and J1939 sensors?
Yes, if it has two CAN ports or a software stack that can filter by identifier range. Keep them on separate buses to avoid ID collisions.
What happens if the sensor fails self-test?
It transmits DM1 with SPN 108 FMI (5) “Current Below Normal”. Many dashboards will light a red lamp within 250 ms.
Is there a cybersecurity concern?
Basic J1939 has no encryption. For road vehicles in UNECE R155 scope you must add a secure gateway or migrate to J1939-22 (CAN-FD + SecOC).
Analog vs J1939 price delta?
Typical OEM volume (1 000 pcs) ex-works prices: 4-20 mA = 23 USD, J1939 = 28–30 USD. The 5-7 USD premium often pays back in harness savings and diagnostics.